Selected Work · Simulation / Robotics
ROS 2 Jazzy와 Gazebo Harmonic을 이용한 Boston Dynamics Spot 통합 시뮬레이션
Ubuntu 24.04 / ROS 2 Jazzy / Gazebo Harmonic 환경에서 Boston Dynamics Spot 4족 보행 로봇의 정밀 시뮬레이션 및 보행 제어 아키텍처를 구축한 프로젝트입니다.
What I did
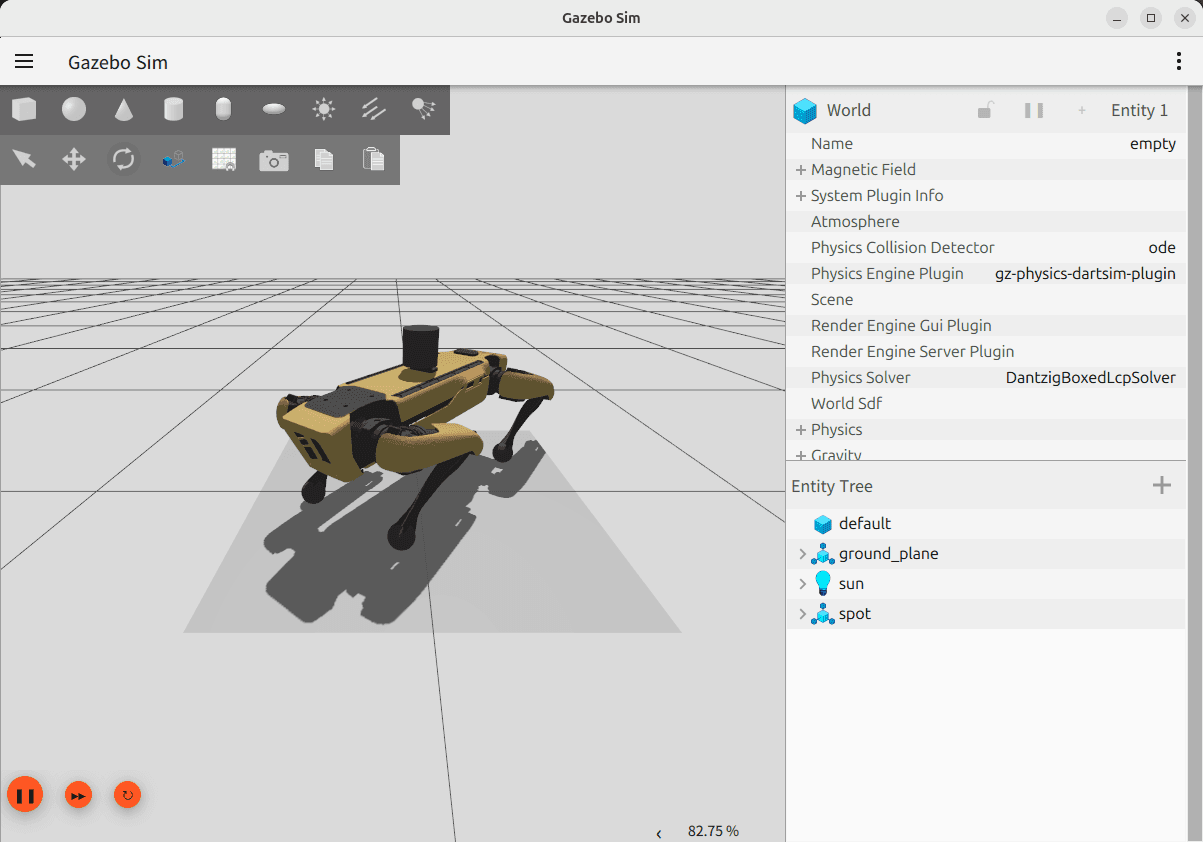
- ROS 2 Jazzy + Gazebo Harmonic + ros_gz_bridge + ros2_control + CHAMP 기반 시뮬레이션 아키텍처 설계
- Gazebo Classic용 URDF/플러그인을 gz_ros2_control 구조로 마이그레이션 및 foot 링크 추가
- CHAMP 컨트롤러 통합 및 joints/links/gait 설정으로 Teleop 보행 제어 파이프라인 완성
- GPU Lidar, IMU 센서 시뮬레이션 및 ROS-Gazebo 브리지 구성으로 센서 데이터 플로우 확보
What changed
- /cmd_vel → CHAMP → JointTrajectoryController → Gazebo 물리 엔진으로 이어지는 end-to-end 제어 체인 구축
- Mock 인터페이스와 Gazebo 인터페이스를 모두 지원하는 Launch 구성으로 디버깅 효율 향상
- 메쉬 경로, 플러그인 초기화 타이밍, segfault 등 실전 이슈들을 구조적으로 해결